


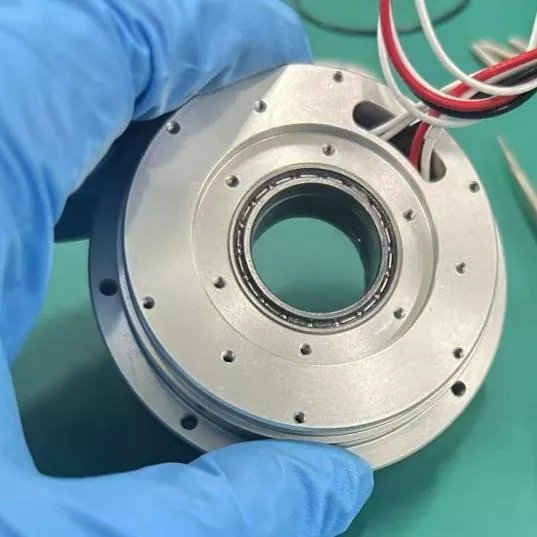
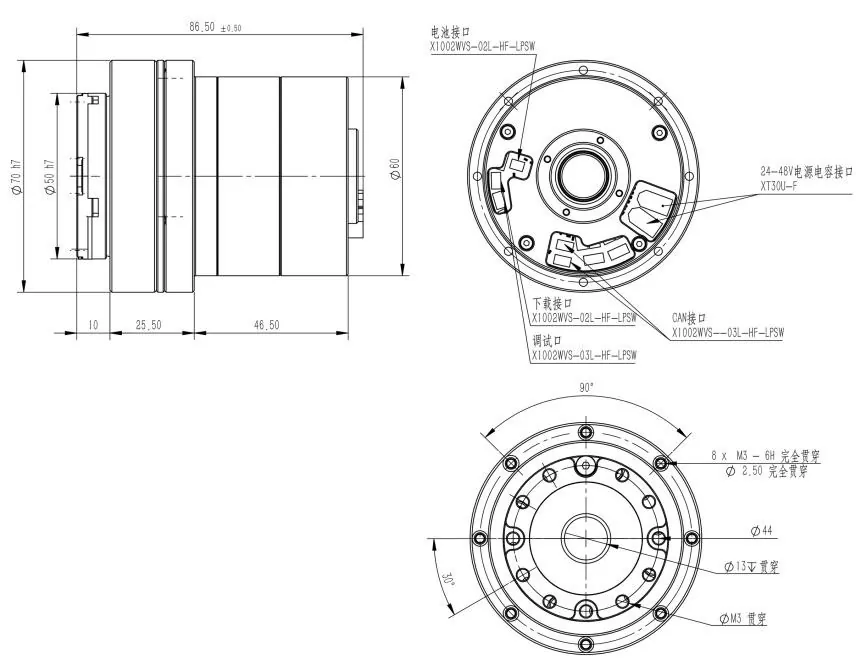
The JYH-D70 harmonic joint module uses a 48V frameless torque motor, a dedicated SEA joint module drive, and dual encoder feedback (17-18 bit magnetic or inductive encoder). It currently supports CAN communication.
The reducer has speed ratios of 51, 81, and 101.
The successful development and small-batch production of the JYH-D70 harmonic joint module within six months is largely attributed to the robust MOTION CONTROL supply chain of SEA MOTION.
We boasts strong R&D capabilities with leading domestic frameless torque motor manufacturers; we are also strategic partners with renowned domestic and international encoder manufacturers; and the dedicated drive for the joint module comes from SEA MOTION technical team. In fact, we have over ten dedicated drive R&D projects for joint modules already delivered or under development, with partners ranging from well-known domestic motor manufacturers to international automotive component giants.

Different from integrated DC servo motors, the JYH-70 harmonic joint module offers higher integration and control precision. They are often used in humanoid robots or robotic dogs for precise motion control. In contrast, planetary joint modules, due to their simpler and lower-cost planetary gearboxes, are weaker in terms of speed control compared to harmonic joint modules.
The DC servo driver for the JYH-70 harmonic joint module comes from the SEA MOTION technical team. To meet the compact requirements of the joint module structure, we developed a high-performance single-board driver. Currently, this driver supports CAN communication, while EtherCAT, CANFD, and RS485 versions are under development.
The magnetic encoders are from the well-known domestic manufacturer KINGKONG; in fact, SEA MOTION is KINGKONG's exclusive distributor in East China. Our inductive encoders come from another well-known company.
Like our Integrated DC servo motor products, we faced the challenge of integrating these excellent components into a truly cohesive whole. We firmly believe that the integration and fusion of the MOTION CONTROL supply chain is essential for a superior manufacturer.
Thus, the JYH-70 was born.
|
Parameter |
Unit |
Gear Ratio |
||
|
Motor Power |
W |
210 |
||
|
Power Supply Voltage |
V |
48 |
||
|
Max Continuous Current |
A |
6 |
||
|
Rated Current |
A |
3.6 |
||
|
Resistance |
Ω |
0.51 |
||
|
Encoder Resolution |
bit |
17-18 |
||
|
Communication Bus |
CAN |
|||
|
Gear Ratio |
— |
51 |
81 |
101 |
|
Peak Torque (Start/Stop) |
N·m |
26 |
37 |
42 |
|
Max Allowable Torque at Average Load |
N·m |
10 |
17 |
17 |
|
Rated Torque @ 2000RPM (Gear Ratio) |
N·m |
7.67 |
12 |
12 |
|
Output Peak Speed |
RPM |
131 |
82 |
66 |
|
Rated Speed (with 1/2 Rated Torque) |
RPM |
86 |
56 |
43 |
|
Gear Backlash |
arcsec |
20 |
10 |
10 |
|
Torque Constant |
N·m/A |
0.091 |
||
|
Inductance |
mH |
0.2 |
||
|
Number of Pole Pairs |
— |
10 |
||
|
Hollow Shaft Diameter |
mm |
13 |
||
|
Length |
mm |
86.5 |
||
|
Weight |
g |
900 |
||
|
Inertia |
g·cm² |
152 |
||
The JYH-70 harmonic joint module uses a 48V DC frameless torque motor. Using standard components increases product stability and reduces procurement costs. Therefore, almost all components used in the JYH-70 product are standard. This requires our R&D team to integrate these components into the design from the initial product development stage.
For dual encoder feedback, we use either magnetic encoders or inductive encoders. These two types of encoders have more mature manufacturing technologies and offer a wider range of models to choose from. SEA MOTION supply chain has products from multiple manufacturers. For the MOTION CONTROL supply chain, stability is paramount.

The JYH-70 harmonic joint module integrates four main components: a Minmetals motor, dual encoders, a dedicated SEA joint module drive, and a harmonic reducer. It boasts advantages such as high integration, rational structure, hollow design, high control precision, and controllable cost.
The main applications as follows:
1. Humanoid robots or robot dogs;
2. Agricultural harvesting robots;
3. Collaborative arms;
4. Automated equipment;



|
Parameter |
Unit |
JYH-D70-XXX-B-EC-CN-A2 |
JYH-D80-XXX-B-EC-CN-A2 |
JYH-D90-XXX-B-EC-CN-A2 |
JYH-D110-XXX-B-CN |
||||||||
|
Motor Power |
W |
210 |
188 |
270 |
485 |
||||||||
|
Power Supply Voltage |
V |
48 |
48 |
48 |
48 |
||||||||
|
Max Continuous Current |
A |
6 |
15 |
14 |
25 |
||||||||
|
Rated Current |
A |
3.6 |
5 |
7.32 |
12.9 |
||||||||
|
Resistance |
Ω |
0.51 |
0.58 |
0.56 |
0.094 |
||||||||
|
Encoder Resolution |
bit |
17-18 |
17-18 |
17-18 |
17-18 |
||||||||
|
Communication Bus |
— |
CAN |
|||||||||||
|
Gear Ratio |
— |
51 |
81 |
101 |
51 |
81 |
101 |
51 |
81 |
101 |
51 |
81 |
101 |
|
Peak Torque |
N·m |
26 |
37 |
42 |
37 |
55 |
62 |
57 |
82 |
90 |
86 |
127.55 |
155 |
|
Max Allowable Torque at Average Load |
N·m |
10 |
17 |
17 |
15 |
22 |
27 |
23 |
34 |
39 |
212 |
226 |
— |
|
Rated Torque @ 2000RPM |
N·m |
7.67 |
12 |
12 |
10 |
14 |
17 |
15 |
22 |
25 |
53 |
85 |
103 |
|
Output Peak Speed |
RPM |
131 |
82 |
66 |
78 |
49 |
39 |
76 |
48 |
38 |
131 |
82 |
66 |
|
Rated Speed (With 1/2 Rated Torque) |
RPM |
86 |
56 |
43 |
64 |
40 |
24 |
60 |
38 |
30 |
86 |
56 |
43 |
|
Gear Backlash |
arcsec |
20 |
10 |
10 |
20 |
20 |
10 |
20 |
20 |
10 |
20 |
10 |
10 |
|
Torque Constant |
N·m/A |
0.091 |
0.096 |
0.174 |
0.091 |
||||||||
|
Inductance |
mH |
0.2 |
0.47 |
0.47 |
0.2 |
||||||||
|
Number of Pole-pairs |
— |
10 |
20 |
10 |
10 |
||||||||
|
Hollow Shaft Diameter |
mm |
13 |
18 |
18 |
27 |
||||||||
|
Length |
mm |
86.5 |
93.5 |
98 |
107.5 |
||||||||
|
Weight |
g |
900 |
1000 |
1200 |
2700 |
||||||||
|
Inertia |
g·cm² |
152 |
441 |
450 |
1262 |
||||||||
Address
403 4F Office Building Robot Industry Park No.232 Yuanfeng Road National High Tech Park Kunshan Suzhou Jiangsu China
Tel









